

Research Overview
 For the latest publications please see the publications page, or my CV, for my publication metrics please see my Google Scholar profile.
For the latest publications please see the publications page, or my CV, for my publication metrics please see my Google Scholar profile.
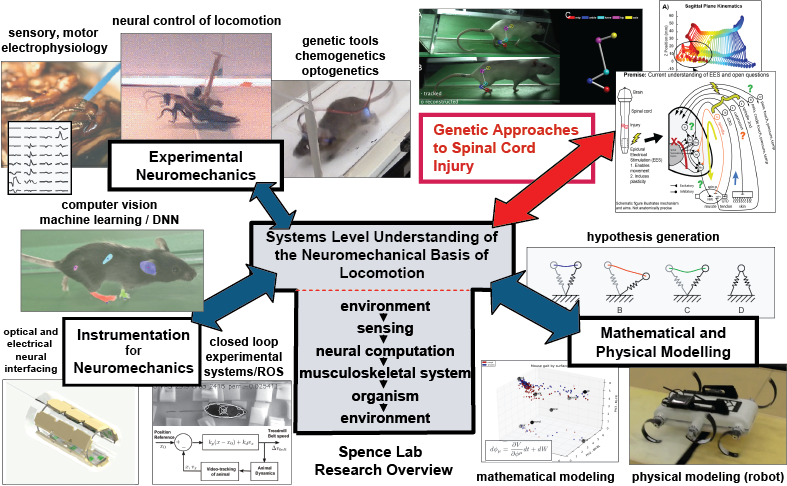
For our research into legged systems, we aim to discover how the neural, muscular, and skeletal components of an organism work together to produce locomotion. This research is of fundamental importance in medicine (how can we improve the lives of those living with spinal cord injuries, patients with neurological disease, or amputees?), engineering (how do we build more agile robots?), basic biology (how has evolution shaped animal movement?), and veterinary science (how do we treat lameness, and create safe environments for animals?). We take an integrative approach that fuses experimental neuroscience, genetic tools, new instrumentation, and mathematical and physical (robot) models. Much of our past work in legged systems focused on how many-legged (>2) animals handle different surfaces.
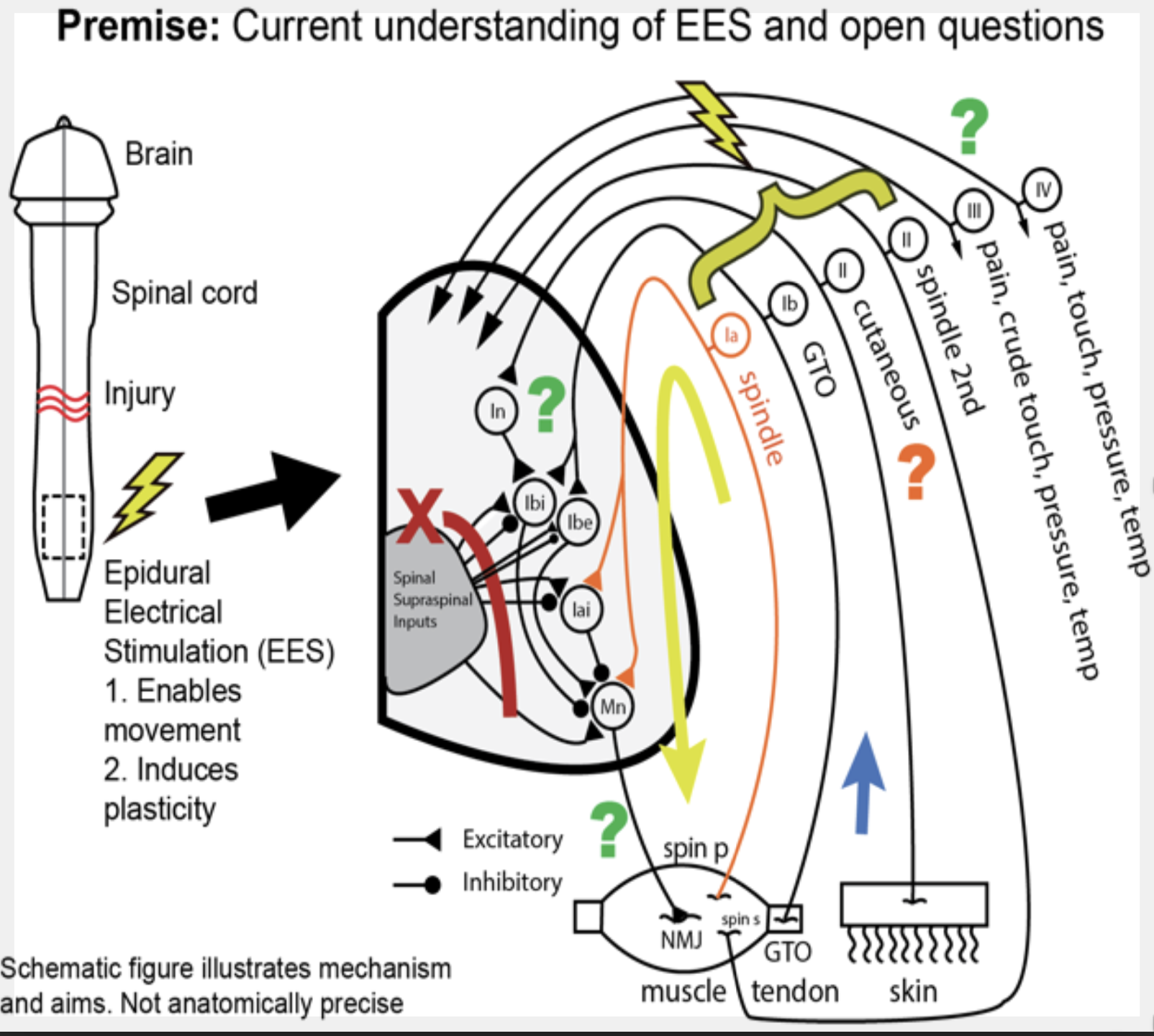
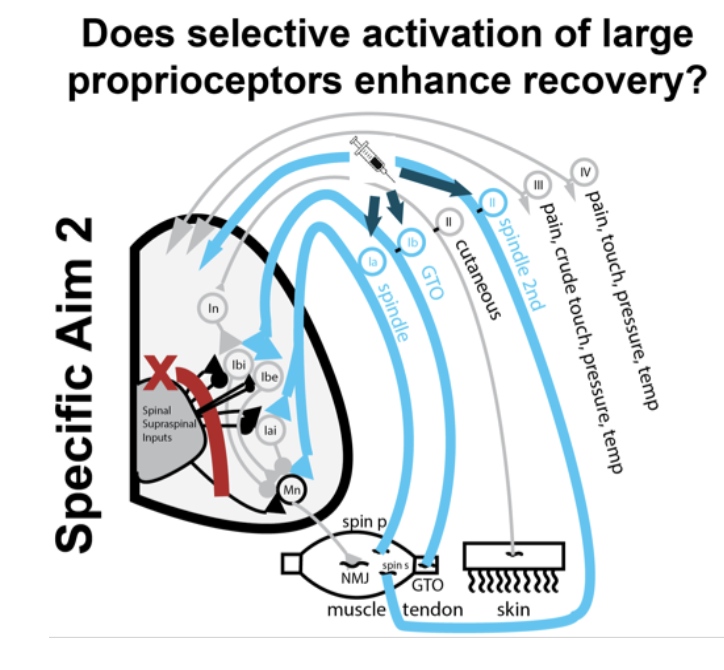
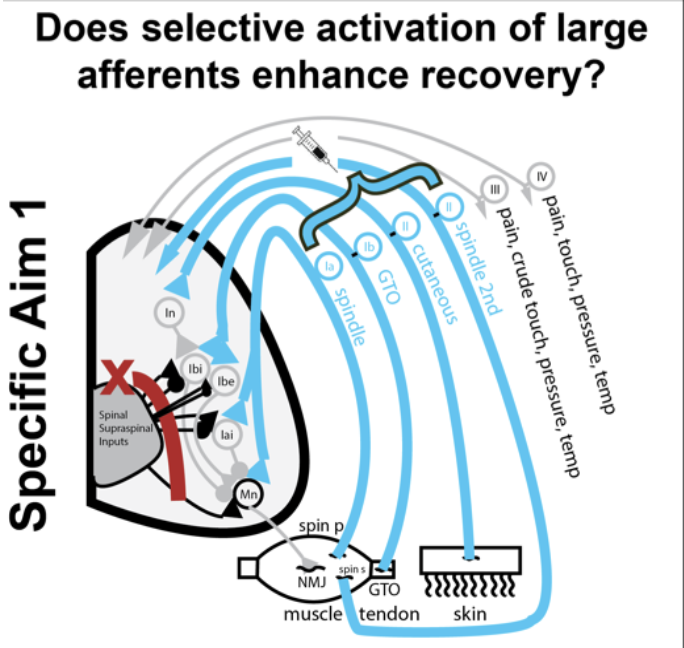
In recent years we have developed a new focus on spinal cord injury. Specifically, we seek to understand how stimulation of sensory nerves with rehabilitation after injury improves recovery, referred to as electrical epidural stimulation. Working the rat model, we are using cutting edge genetic tools (DREADDs) to activate or suppress afferent activity while animals run on a treadmill. These tools allow us to target specific neurons and activate them remotely with drug delivery, and then trace the activated neurons with histological methods, dissecting the helpful plasticity that occurs in spinal cord circuits.
A long term focus on the lab has been a dynamical systems approach to quadrupedal gaits. In dogs, horses and spiders we are developing tools to quantify gaits, and how animals choose gaits. With these new tools, we have found that gait transitions are remarkably stereotyped. Formulating a dynamical systems model of quadrupedal gait, we found that dogs walking outside on natural rough terrain adjust their gait towards the idealised trot. They further allowed analysis of limping in spiders that have lost legs, demonstrating their mechanisms of robustness. Finally, other groups have started using these tools to analyze the gaits of spinal cord injured animals, giving better insight into how neural circuitry is affected.
Finally, we have a thread of research focused on the biomechanics and evolution of gliding. This has been a long term collaboration with Dr. Greg Byrnes.
Research By Project/Grant
 PA CURE Spinal Cord Research Program - Enhancing rehabilitation effectiveness with coactivation of corticospinal neurons.
PA CURE Spinal Cord Research Program - Enhancing rehabilitation effectiveness with coactivation of corticospinal neurons.
×
 NIH NINDS R01 Chemogenetic afferent modulation to understand spinal cord circuit function and plasticity post injury
NIH NINDS R01 Chemogenetic afferent modulation to understand spinal cord circuit function and plasticity post injury
 NIH CNNT R01 Adaptation of internal motor copy circuits in recovery after spinal cord injury.
NIH CNNT R01 Adaptation of internal motor copy circuits in recovery after spinal cord injury.

×
 Craig H. Neilsen Foundation Senior Research Grant - Can chemogenetic afferent stimulation enhance recovery from SCI?
Craig H. Neilsen Foundation Senior Research Grant - Can chemogenetic afferent stimulation enhance recovery from SCI?
 Shriners Hospitals For Children Research Grant - Chemogenetic Afferent Modulation to Improve Recovery from SCI
Shriners Hospitals For Children Research Grant - Chemogenetic Afferent Modulation to Improve Recovery from SCI
 Army Research Office (ARO) — NOFALL: Neuromechanics and Optogenetics: Dissecting Fast Legged Locomotion
Army Research Office (ARO) — NOFALL: Neuromechanics and Optogenetics: Dissecting Fast Legged Locomotion
 BBSRC — Foundations of Neuromechanical Systems Biology
BBSRC — Foundations of Neuromechanical Systems Biology
 Royal Society — Closing the loop in legged neuromechanics
Royal Society — Closing the loop in legged neuromechanics
 EPSRC — Bioinspired Control Architectures for Multileggd Locomotion
EPSRC — Bioinspired Control Architectures for Multileggd Locomotion
Research By Topic
Click on each topic for a more detailed description
(Please enable JavaScripts to display this page)
Spinal Cord Injury
Instrumentation, Devices, Computer Vision, Imaging, and Robotics
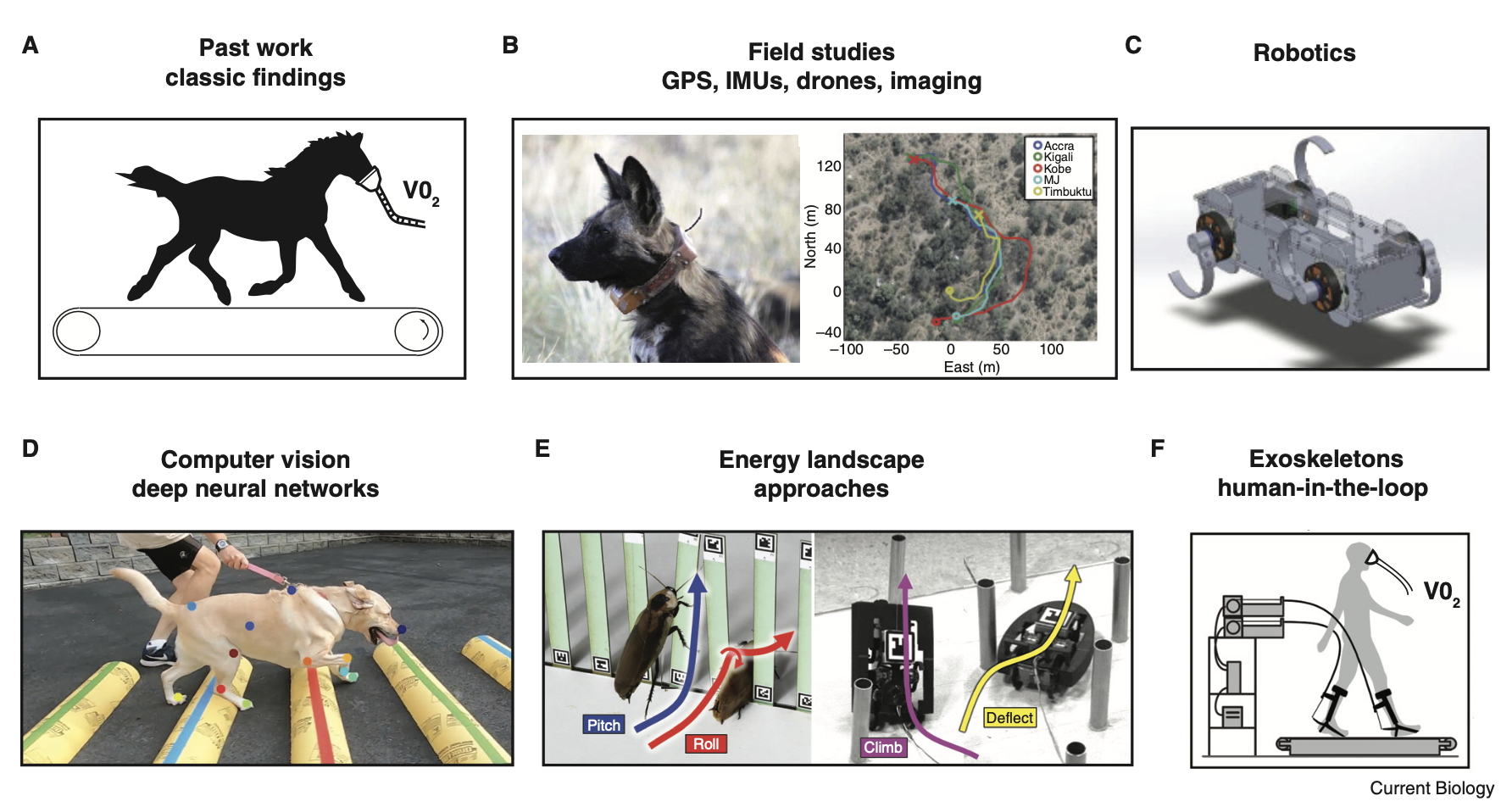
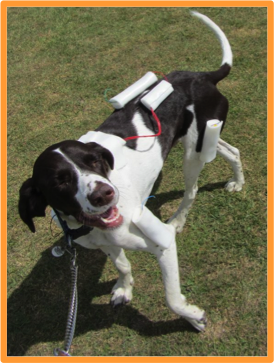
 Two of the major limitations in experimental biology are 1) obtaining detailed data from intact, freely behaving animals in their natural environment, and 2) placing measurements of one part of an animal in the full context of the rest of the animal. With the first problem, we desire naturalistic stimuli to ensure that our explanations of function are both relevant to the animal's biology, and not artifact. For the second, the problem is that the function of any one organ within an animal is intertwined with the rest of the animal; the more we can do to simultanously monitor multiple parts of the animal, the better our explanations of organ function can be. To these ends, we have worked to develop sensor backpacks for animals in the wild (see Colugo work with Greg Byrnes), and flexible microarrays to record from multiple muscles in insects. With the advent of miniature sensors, microcontrollers, GPS tracking, and machine vision techniques, we are entering a golden age for integrative biology.
Two of the major limitations in experimental biology are 1) obtaining detailed data from intact, freely behaving animals in their natural environment, and 2) placing measurements of one part of an animal in the full context of the rest of the animal. With the first problem, we desire naturalistic stimuli to ensure that our explanations of function are both relevant to the animal's biology, and not artifact. For the second, the problem is that the function of any one organ within an animal is intertwined with the rest of the animal; the more we can do to simultanously monitor multiple parts of the animal, the better our explanations of organ function can be. To these ends, we have worked to develop sensor backpacks for animals in the wild (see Colugo work with Greg Byrnes), and flexible microarrays to record from multiple muscles in insects. With the advent of miniature sensors, microcontrollers, GPS tracking, and machine vision techniques, we are entering a golden age for integrative biology.Terrestrial Locomotion
 Energetics of Locomotion Primer
Energetics of Locomotion Primer
 Gait Dynamics
Gait Dynamics
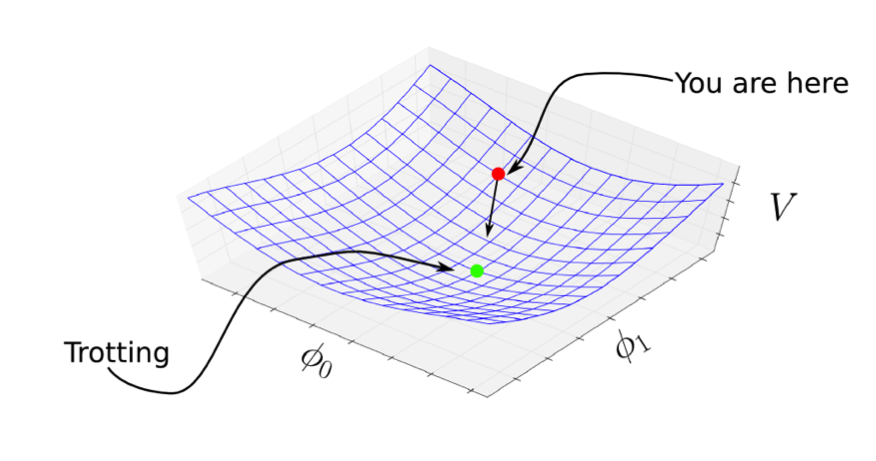 When animals move they often choose a specific gait, or stereotyped pattern of movement, for a given speed. These include the familiar walk, trot, and gallop of horses. Postdoc Simon Wilshin, working with our collaborators Clark Haynes, Shai Revzen, and Dan Koditschek, has been spearheading some fascinating new work on animal gaits. We have developed new phase based approaches to quantifying gaits, on top of which we are developing a dynamical systems model of gait control. With these tools, we have been able to examine the role of static stability in shaping gait transitions in dogs, have found that dogs walking on natural rough terrain adjust their gait to be more "trot like," and are gearing up to use this model as a controller for our legged robot.
When animals move they often choose a specific gait, or stereotyped pattern of movement, for a given speed. These include the familiar walk, trot, and gallop of horses. Postdoc Simon Wilshin, working with our collaborators Clark Haynes, Shai Revzen, and Dan Koditschek, has been spearheading some fascinating new work on animal gaits. We have developed new phase based approaches to quantifying gaits, on top of which we are developing a dynamical systems model of gait control. With these tools, we have been able to examine the role of static stability in shaping gait transitions in dogs, have found that dogs walking on natural rough terrain adjust their gait to be more "trot like," and are gearing up to use this model as a controller for our legged robot. Control of legged locomotion on soft surfaces
Control of legged locomotion on soft surfaces
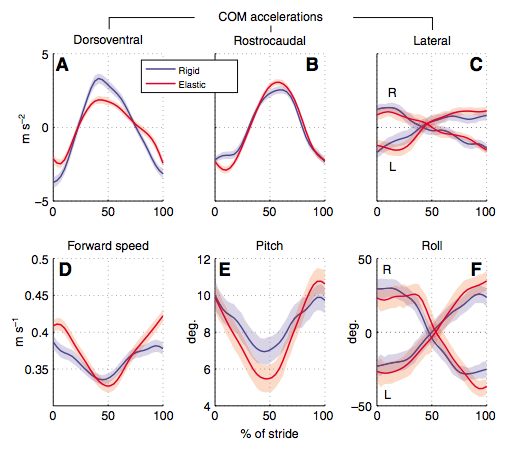
Technologically, this paper leveraged tools from physics and computer science to break new ground in biology. We measured the dynamics of the freely running insect with a MEMS accelerometer backpack fused to data from an automatic video tracking system. Not only does the backpack allow continuous recording of large amounts of data, a requirement to test many of the most exciting, dynamical systems based hypotheses of control, it enables real-time, phase locked perturbations.
Currently, we are looking at whether dogs stiffen their virtual leg on soft surfaces, and seeking explanations for their behaviour with a six-legged robot, the X-RHex Lite (XRL), in collaboration with Prof. Dan Koditschek at the Univ. of Penn.
 Maximum performance
Maximum performance
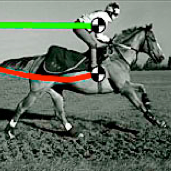
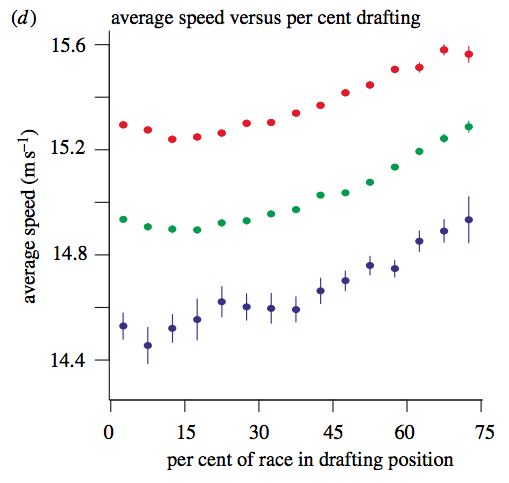 What limits maximum performance in legged locomotion? Can we apply different loads to moving animals to determine the constraints to speed? Many animals rely on speed to escape predators or catch prey, and some do so in groups. How does being in a pack of animals affect performance? In a 2009 Science paper, we studied the mechanics of race riding jockeys, and found that their crouched posture, which mechanically isolates them from the horse, makes it easier for the horse, causing a large drop in race times at the turn of the century. More recently, using a large data set from a wireless tracking system in place during actual horse races, we have found that aerodynamic drafting, or moving close behind another horse to reduce drag, has a significant effect on race times. PhD student Zoe Self has done further nice work with these data, showing that horses slow down far more than expected when going downhill, suggesting a mechanical, or force limit, to their performance.
What limits maximum performance in legged locomotion? Can we apply different loads to moving animals to determine the constraints to speed? Many animals rely on speed to escape predators or catch prey, and some do so in groups. How does being in a pack of animals affect performance? In a 2009 Science paper, we studied the mechanics of race riding jockeys, and found that their crouched posture, which mechanically isolates them from the horse, makes it easier for the horse, causing a large drop in race times at the turn of the century. More recently, using a large data set from a wireless tracking system in place during actual horse races, we have found that aerodynamic drafting, or moving close behind another horse to reduce drag, has a significant effect on race times. PhD student Zoe Self has done further nice work with these data, showing that horses slow down far more than expected when going downhill, suggesting a mechanical, or force limit, to their performance. 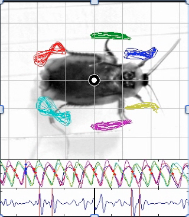 Neuromuscular control of legged locomotion
Neuromuscular control of legged locomotion
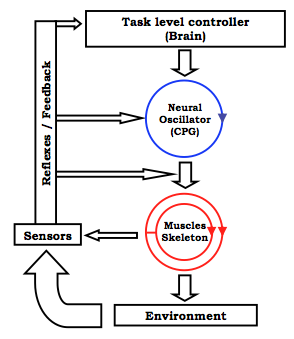 How legged animals move fast is still an intriguing puzzle. We know what parts of the animal contribute to it: muscles, skeleton, sense organs, the nervous system. But we don't know how much of fast locomotion is handled by the musculoskeletal system, and how much is actively controlled by the nervous system. Muscles are complicated, non-linear actuators, that may be able to handle a broad range of perturbations with the same input signal. Sensory feedback from limbs may be too delayed during fast locomotion to be useful, and therefore be ignored. PhD student Anna Liedtke has been working to understand whether large animals, in this case horses, can make use of sensory feedback from the distal limb during trotting on a treadmill. So far, anesthetizing the hoof does not appear to affect the kinematics of horse locomotion: suggesting that this feedback is not necessary for steady state trotting in horses. With Simon Sponberg, we examined the potential of muscles to control the body of cockroaches: we found that injecting spikes into a main extensor muscle of freely running cockroaches had surprisingly little effect on their body dynamics: this highlighted to context dependence of neural commands.
How legged animals move fast is still an intriguing puzzle. We know what parts of the animal contribute to it: muscles, skeleton, sense organs, the nervous system. But we don't know how much of fast locomotion is handled by the musculoskeletal system, and how much is actively controlled by the nervous system. Muscles are complicated, non-linear actuators, that may be able to handle a broad range of perturbations with the same input signal. Sensory feedback from limbs may be too delayed during fast locomotion to be useful, and therefore be ignored. PhD student Anna Liedtke has been working to understand whether large animals, in this case horses, can make use of sensory feedback from the distal limb during trotting on a treadmill. So far, anesthetizing the hoof does not appear to affect the kinematics of horse locomotion: suggesting that this feedback is not necessary for steady state trotting in horses. With Simon Sponberg, we examined the potential of muscles to control the body of cockroaches: we found that injecting spikes into a main extensor muscle of freely running cockroaches had surprisingly little effect on their body dynamics: this highlighted to context dependence of neural commands. Scaling
Scaling
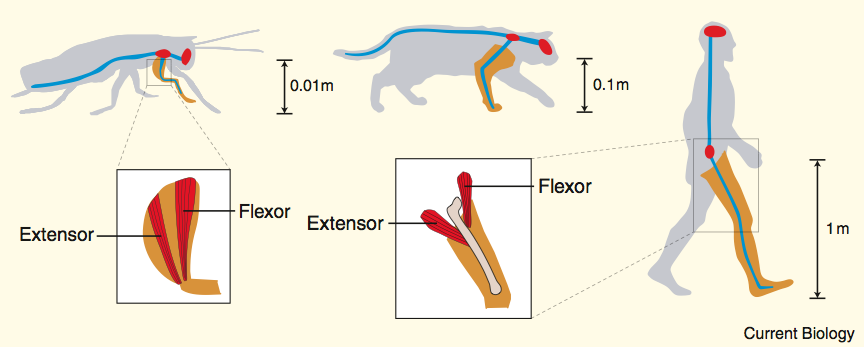 Evolution as carried out experiments for us, producing animals of a huge range of size. Not only that, but animals have adapted diverse locomotor behaviours. This presents us with an opportunity: because the physics of the world changes with size, we can use size as a "knob" to look for systematic changes in how animals work. With size as a control parameter, we can try to see if, for example, there are consistent differences in how small animals like insects, versus larger animals like dogs and horses, control their bodies as they move. In a 2009 Primer, I offer an introduction to analysis of scale in biology, and highlight some fertile ground for future analyses of scaling. In an editorial with John Hutchinson, we highlight the growing opportunities to link across length scales in analyses of size, and how size is controlled.
Evolution as carried out experiments for us, producing animals of a huge range of size. Not only that, but animals have adapted diverse locomotor behaviours. This presents us with an opportunity: because the physics of the world changes with size, we can use size as a "knob" to look for systematic changes in how animals work. With size as a control parameter, we can try to see if, for example, there are consistent differences in how small animals like insects, versus larger animals like dogs and horses, control their bodies as they move. In a 2009 Primer, I offer an introduction to analysis of scale in biology, and highlight some fertile ground for future analyses of scaling. In an editorial with John Hutchinson, we highlight the growing opportunities to link across length scales in analyses of size, and how size is controlled. Gliding
 Some animals have evolved spectacular locomotor adaptations to their ecological niche. Colugos are large, nocturnal primates that live in the rainforests of Singapore. Weighing a kilogram, they glide many tens of meters through the canopy at night. In a long term collaboration with Greg Byrnes, we have studied the biomechanics and evolution of colugos, in order to understand the evolutionary pressures that have shaped this extraordinary behaviour, and to identify the key mechanisms that support gliding behaviour. Using novel accelerometer backpacks specifically designed for these animals, we discovered that colugos are quite aerobatic; they use a parachute maneuver to reduce forces on landing. Placed in a evolutionary context, we further found that gliding is significantly correlated with a shift in diet: particularly to one consistenting of relatively low quality neutrients, that are sparsely located. Interestingly, we did not find support for the hypothesis that gliding evolved as an energetically cheap form of locomotin.
Some animals have evolved spectacular locomotor adaptations to their ecological niche. Colugos are large, nocturnal primates that live in the rainforests of Singapore. Weighing a kilogram, they glide many tens of meters through the canopy at night. In a long term collaboration with Greg Byrnes, we have studied the biomechanics and evolution of colugos, in order to understand the evolutionary pressures that have shaped this extraordinary behaviour, and to identify the key mechanisms that support gliding behaviour. Using novel accelerometer backpacks specifically designed for these animals, we discovered that colugos are quite aerobatic; they use a parachute maneuver to reduce forces on landing. Placed in a evolutionary context, we further found that gliding is significantly correlated with a shift in diet: particularly to one consistenting of relatively low quality neutrients, that are sparsely located. Interestingly, we did not find support for the hypothesis that gliding evolved as an energetically cheap form of locomotin.