
EPSRC Bioinspired Control Grant
In 2010 the Engineering and Physical Science Research Council (ESPRC, UK) funded a New Investigator grant to AJS to study how legged animals control their locomotion. The project is taking an integrative approach, using data from dogs, modeling and analysis techniques from non-linear control and dynamical systems theory, and combining them with experiments in a six legged robot. The robot is the X-RHex Lite (XRL), the latest and greatest RHex robot, made by our exceptional collaborators at the Kod*Lab at Penn. Postdoc Simon Wilshin came on board, and working extensively with our collaborators in the Kod*Lab at the University of Pennsylvannia, we have made some quite interesting progress, from comparative biomechanics through non-linear control theory, and are now heading back to the robot.

How do animals coordinate their legs in the face of an uncertain environment? How do they remain stable and conserve energy when confronted with challenges such as a soft surface that gives way, or rough and bumpy terrain? Do dogs stiffen their legs to handle soft surfaces, as humans do? Or does having four legs instead of two mean that you don’t have to? Do they adjust their gait (walking, trotting, galloping) when challenged by rough terrain? If we figure out how animals do these things, can we use this knowledge to improve the agility and economy of our robots?
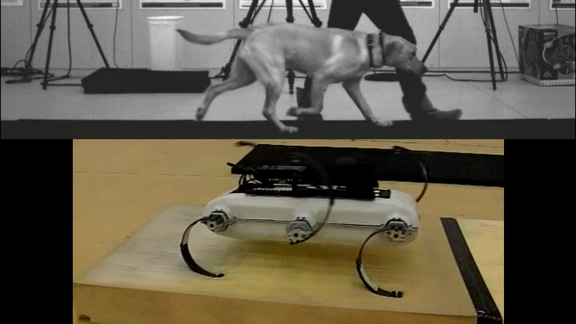
In this project we addressed these questions, and have made several fascinating discoveries. First, we looked at how dogs handle soft surfaces, and then once we had observations of what dogs do, we used our robot to try to understand why dogs move the way they do on soft surfaces (click image below for movie). One of the most interesting findings in comparative animal locomotion is that animals as a different as dogs and humans both run (or trot) with a bouncy gait that looks like a pogo stick. Furthermore, humans stiffen their pogo stick spring when they are confronted with soft surfaces. The first main finding of our project was that dogs do not stiffen their pogo stick spring when they are confronted with soft surfaces. This suggests that stiffening the pogo stick spring is not a general principle of how nervous systems control locomotion. We then asked why this might be the case: to do so, we turned to our robot, because (unlike the dog) it is ethical to modify it’s legs, we can control its brain, and we can easily measure things like how much energy it uses. Fascinatingly, we found that the robot used more energy when we increased its leg stiffness to handle the soft surface. Because the robot is a reasonable representation of the dog, and moves like the dog, this suggests that dogs don’t stiffen their legs because it would cost more energy to do so. We presented this work at two exciting events at the Science Museum in London, including the Europe-wide Robotville Festival. The crowd were extremely interested to see a six-legged, cockroach inspired robot clambering over rough terrain at high speed.
(Click image to download movie; or use YouTube link below)
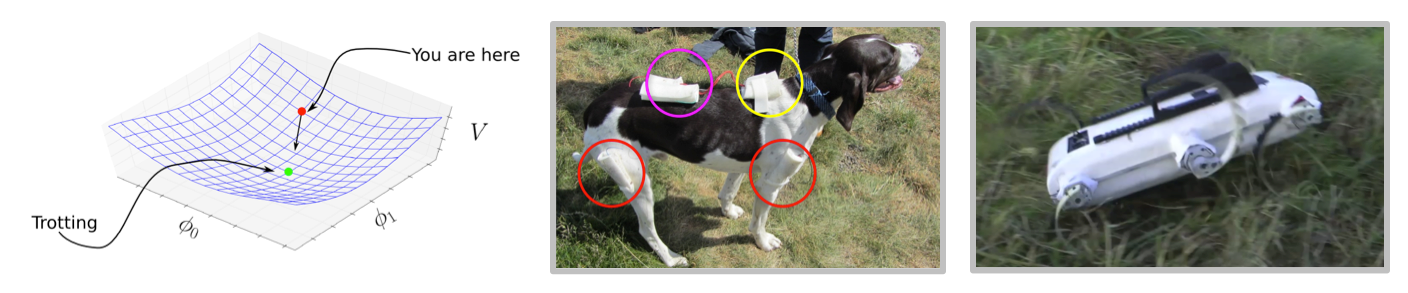
To address this challenge, we developed a mathematical model of quadrupedal gait generation based on techniques from the non-linear control theory. The model consists of a set of differential equations that we first validated with data from dogs on treadmill, whose speed was ramped up and down repeatedly so that the dogs moved at walk, trot, gallop, and made transitions between. We then used the model to ask the question: do dogs adjust their gait when they are confronted with natural rough terrain? We used the model to simulate what would happen to a walking dog when it is confronted with bumpy ground – and the model predicted that the dog’s gait would move become more trot-like. This is very interesting – as the noise we added could have sent the gait anywhere – towards other gaits such as the bound or pace. But the model predicts that moving towards trot is more stable. We then conducted experiments with dogs outdoors, outfitted with sensors on their legs and satellite tracking of their speed and position, and measured what happens to real dogs when they are confronted with bumpy ground. A very exciting finding was that the dogs gait moved towards the trot, as predicted by the model. (Click image to download movie, or use YouTube frame below)
Outreach
We've had the opportunity to use the robot for several exciting outreach events. Two of these were at the Science Museum in London, with a further event at the Westminster School in London. We displayed the robot to curious and engaging youngsters as part of an Antenna Gallery exhibition (below left; photo credit Jennie Hills, Science Museum), and then went on to demonstrate the robot as part of the Europe-wide Robotville Festival (below right; photo credit Michelle Reeve). This festival featured 22 of the most exciting robots from acros Europe. We demonstrated the running, rubble conquering XRL robot to nearly 8000 visitors over four full days, and gave two overview talks during these visits. The event was covered live on national television, and garnered wide publicity.